A Proportional-Integral-Derivative controller, is a type of feedback control system widely used in industrial and process control applications to regulate and maintain desired setpoints by continuously adjusting a control signal based on the error between the setpoint and the actual process variable.
They used a branch of mathematics called control theory to calculate the control signal, optimizing the system's response and reducing errors, especially steady state and overshoot errors.
The controller is based on 3 terms:
Proportional
Integral
Derivative
PID control
Proportional (P) Term
The proportional term produces an output that is directly proportional to the current error. It essentially scales the error to determine the control output. When the error is large, the control output is large, and when the error is small, the control output is small.
The proportional term helps to reduce the steady-state error and brings the process variable closer to the setpoint.
proportional control
Integral (I) Term
The integral term takes into account the cumulative error over time. It calculates the integral of the error and generates an output based on this accumulated error. The integral term helps to eliminate any long-term steady-state errors that may be present in the system.
integral control
Derivative (D) Term
The derivative term considers the rate of change of the error. It calculates the derivative of the error and generates an output based on how quickly the error is changing. The derivative term helps to reduce overshoot and oscillations in the system's response.
derivative
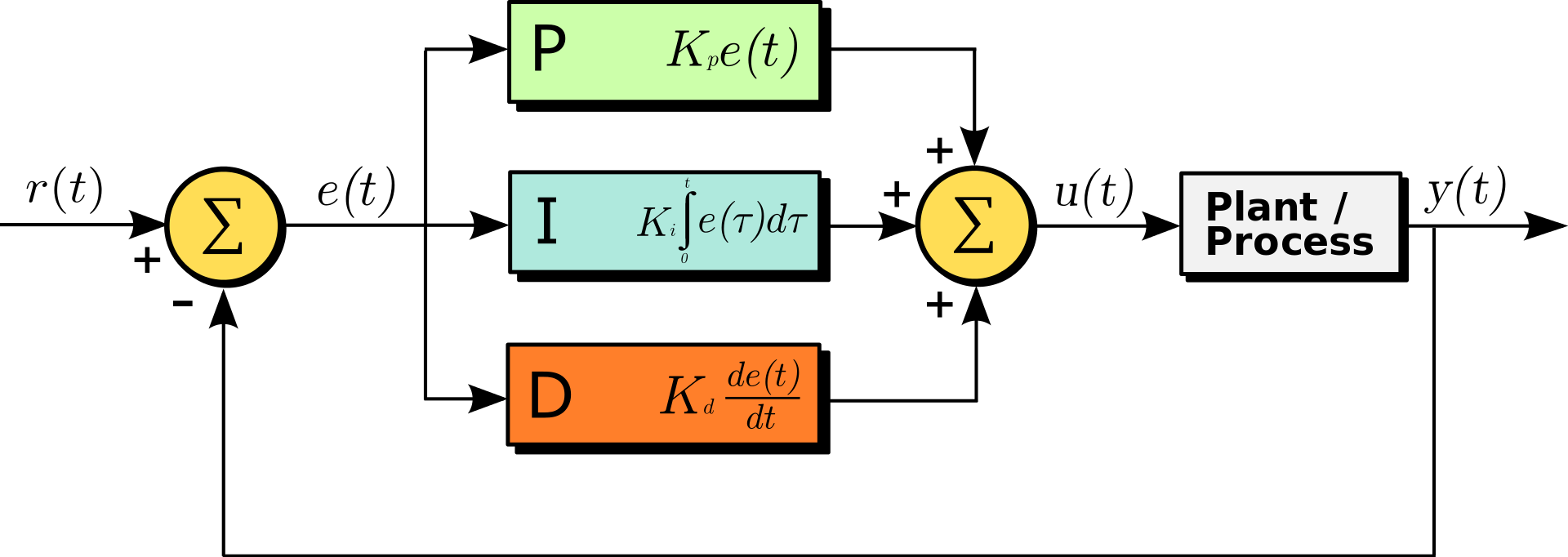
PID Formula Diagram
The PID formula is as follows:
This can be visualized using the following diagram. As you can see the three separate terms are combined to form the output value.