Robot grabbers are essential components in robotic systems designed for manipulation tasks. They enable robots to pick, hold, and move objects efficiently in various industrial applications.
The design and functionality of grabbers can vary significantly based on the intended application, the types of objects being handled, and the operating environment. Understanding the basic principles of different grabber types sets the foundation for exploring their practical uses and advantages.
Which factor can significantly affect the design of robot grabbers?
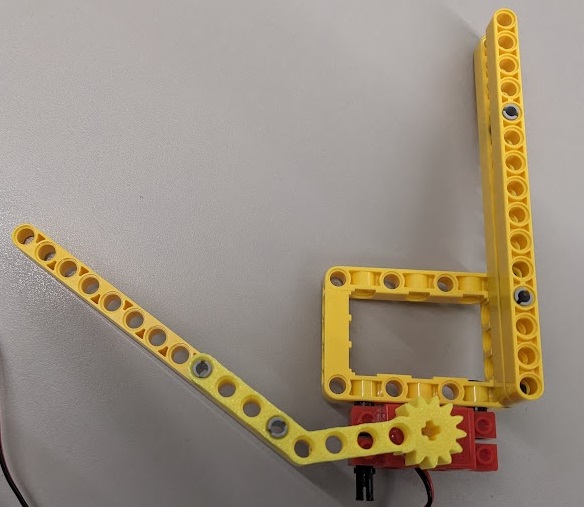
Single-Moving Pinching Grabber
Mechanism
A simple single arm grabber mechanism where only one arm moves, while the other remains stationary.
Key Components
A fixed arm.
A moving arm controlled by a motor or servo.
Advantages
Simpler design with fewer moving parts.
Requires only one motor or servo
Example Use
Picking up small blocks from a fixed position.
What is the main function of the simple single arm grabber mechanism?
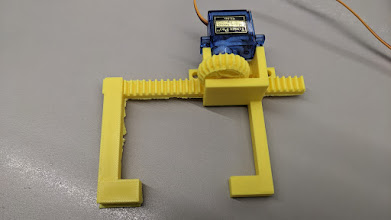
Parallel Grabber
A parallel grabber consists of two parallel arms move symmetrically to grab objects. They allow for simultaneous contact along the length of the arms.
Key Components
A linear motion mechanism.
Worm gears or sliders for precision.
Best For
Uniformly shaped objects such as boxes or crates.
Example Use
Holding rectangular objects like boxes or cans
A parallel grabber consists of two parallel arms that move symmetrically to grab .
Linear Single Moving Arm Grabber
Mechanism
A linear single are grabber uses a single arm that moves linearly to push or pull an object into place.
Key Components
A sliding mechanism for linear motion.
A motor or rack-and-pinion system for control.
Advantages
Ideal for controlled environments where precise linear motion is required.
Simplifies grabbing objects aligned in a straight line.
Uses fewer components that double moving are grabbers
Example Use
Moving an object along a track or placing it into a designated slot.
What mechanism is commonly used to achieve linear motion in a single arm grabber?
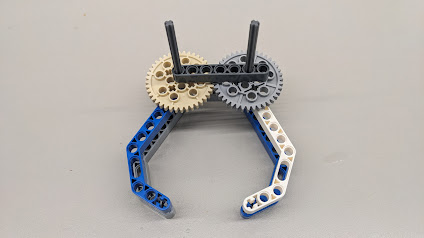
Double Moving Grabber
Mechanism
With a double arm grabber both arms move symmetrically toward each other to grip an object, often by rotating the arms towards each other.
Key Components
Two movable arms connected by gears, linkages, or racks.
A single motor driving both arms in opposite directions.
Advantages
More versatile and can adapt to objects that are slightly off-center.
Provides better balance during gripping.
Example Use
Picking up balls or items that may shift slightly in position.
A double-moving arm grabber uses two movable arms connected by , linkages, or racks are key components of the mechanism.
Suction Grabber
Mechanism
A suction cup grabber uses a vacuum or air pressure to attach to objects, utilising negative pressure to hold the object in place.
Key Components
A suction cup.
An air pump (if available in your LEGO kit).
Best For
Smooth, flat surfaces.
Example Use
Picking up plates or smooth tiles.
The key component required for a suction cup grabber is a cup.
Magnetic Grabber
Mechanism
A magnetic grabber uses an electro magnetic that works with metallic objects that are susceptive to magnetism, such as steel. Once the grabber has moved the object to the desired position the electromagnet is deactivated and the object is released.
Key Components
An electromagnet.
Best For
Metallic objects.
Example Use
Retrieving screws or coins. Also used in scrap yards to move scrap vehicles.
A magnetic grabber uses an electro that works with metallic objects that are susceptive to magnetism.
Forklift Grabber
Mechanism
A forklift-like design lifts objects from underneath.
Key Components
A lifting platform or fork.
Gears and motors for vertical movement.
Best For
Flat-bottomed objects.
Example Use
Transporting small pallets or boxes.
What type of objects are forklifts best suited for?
Scooping Grabber
Mechanism
A Scooping Grabber uses scoop or bucket is used to lift objects from underneath, relying on gravity to hold the object in the scoop whilst it is being moved.
Key Components
A bucket-like attachment.
A servo or motor for tilting.
Best For
Loose objects like marbles or grains.
Example Use
Collecting small items from a surface.
The Scooping Grabber is best for loose objects like or grains.
Multi-Fingered Grabber
Mechanism
A multi-fingered grabber mimics a human hand with multiple fingers for gripping. It is more complex to engineer than most other types of grabber but it is highly useful when attempting to manipulate complex or irregular shaped objects.
Key Components
Flexible beams or Technic pieces as fingers.
Motors or servos for control.
Best For
Objects of varying sizes and shapes.
Example Use
Grabbing items with precision, like pens or tools.
What is the primary advantage of a multi-fingered grabber compared to simpler grabbers?